Les sciences au coeur du Périgord !
Robotique : plateforme "Educator" et ses variantes
Variantes de la plateforme "Educator" et ses comportements simples :
© Copyright 2018 Constellations & Galaxies
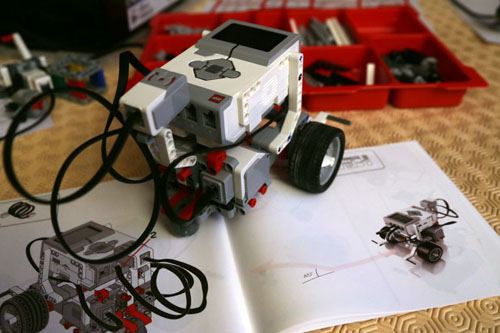
Vue avant de la plateforme "Educator" avant son équipement par différentes variantes de capteurs/moteurs. Sa conception astucieuse permet d'accrocher des accessoires soit sur les "bras" soit le "cadre". A noter les deux moteurs activant les roues connectés sur deux bornes de l'unité EV3.
La construction complète de cette plateforme à partir de zéro nécessite un temps relativement long (environ 25mn pour un opérateur expérimenté).
Une fois la construction terminée, on peut tout de suite tester Educator avec un programme simple préenregistré dans la mémoire de l'unité EV3 (cliquer sur l'image pour voir une courte vidéo de cette démonstration).
La construction complète de cette plateforme à partir de zéro nécessite un temps relativement long (environ 25mn pour un opérateur expérimenté).
Une fois la construction terminée, on peut tout de suite tester Educator avec un programme simple préenregistré dans la mémoire de l'unité EV3 (cliquer sur l'image pour voir une courte vidéo de cette démonstration).
Illustration du système de programmation graphique sur tablette Androïd des robots construits avec les kits Lego Mindstorms EV3 (photo Lego).





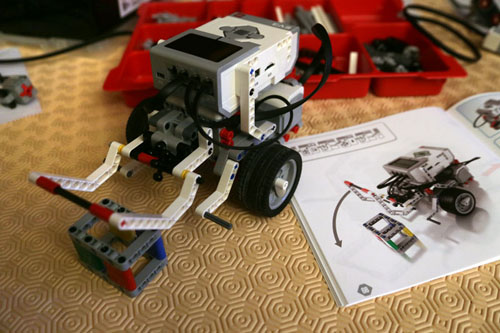
Vue arrière au même stade de construction. On peut voir les connecteurs reliés aux deux gros moteurs et un "cadre" arrière permettant d'accueillir des accessoires.
Pour contourner la durée de construction complète de la plateforme, il sera possible de proposer un "chassis" prémonté permettant aux élèves de construire plus vite la plateforme (ajout de l'unité centrale et connection des moteurs) et de limiter leur temps de construction aux différents accessoires afin d'accéder plus vite aux séquences de programmation et aux essais. Le but de l'atelier est avant tout la compréhension des éléments constitutifs d'un robot (capteurs, moteurs) et l'expérimentation de la programmation de leur comportement, pas la compétence en construction à partir des briques Lego.
A la fin de la construction, le manuel propose la création d'un programme simple pour la plateforme Educator nue, en décrivant pas à pas l'utilisation directe de l'unité EV3 pour y parvenir (page sous les roues). Cette étape permet d'initier les élèves à l'interface simplifiée (petit écran, système de bouton façon "télécommande" : pavé droite/gauche haut/bas autour du bouton "validation" et bouton séparé "abandon/retour"). Une fois le système bien compris, les courts programmes proposés avec chaque variante pourront facilement être saisis. Nota : si des élèves éprouvent des difficultés ou sont en retard, ils pourront accéder à des versions enregistrées en mémoire.
(cliquer sur l'image pour voir une courte vidéo)
(cliquer sur l'image pour voir une courte vidéo)
Variante 1 : plateforme Educator équipée du capteur à ultrasons (distance) très rapide à assembler. Programme associé : arrêt avant un obstacle, à une distance paramétrable (cliquer sur l'image pour voir une courte vidéo).
Variante 2 : plateforme Educator équipée du capteur gyroscope (position) à l'arrière, très rapide à assembler. Programme associé : virage à 45° (cliquer sur l'image pour voir une courte vidéo).
Variante 3 : plateforme Educator équipée du 3ème moteur (action), nécessitant un assemblage un peu plus long. Programme associé : capture de la "caisse" et recul (cliquer sur l'image pour voir une courte vidéo).
Variante 4 : plateforme Educator équipée du capteur de couleurs en position verticale (détection d'une marque au sol), très rapide à assembler. Programme associé : arrêt sur une ligne sombre (cliquer sur l'image pour voir une courte vidéo).
Variante 5 : plateforme Educator équipée du capteur de couleurs en position horizontale (détection d'un signal à l'avant), très rapide à assembler. Programme associé : démarrage sur la détection de la couleur bleue (cliquer sur l'image pour voir une courte vidéo).
Aperçu de la programmation directe sur l'interface de l'unité EV3 :







Variante 6 : plateforme Educator équipée du capteur tactile (contact), très rapide à assembler. Programme associé : démarrage à l'appui sur le capteur (cliquer sur l'image pour voir une courte vidéo).
L'interface simplifiée de l'unité EV3 : écran d'affichage LCD (à noter en haut à gauche l'état de la liaison Bluetooth et à droite le niveau de charge de la batterie), le pavé de navigation dans les options (haut/bas, droite/gauche) autour du bouton de validation, et le bouton d'annulation (à gauche sous l'écran).
Programme vide avec les blocs début et fin (à gauche l'accès à l'enregistrement du programme en mémoire ou le rappel d'un programme enregistré). La touche "haut" permet d'accéder à la bibliothèque des blocs logiciels.
Choix d'un bloc logiciel dans la bibiothèque par navigation (les icones symbolisent les fonctions comme en bas à droite l'avance avec les deux roues). Le bouton de validation insère le bloc choisi dans le programme.
Le bloc choisi a été inséré dans le programme. Le bouton de validation permet de régler le paramètre du bloc, par exemple ici la direction du déplacement.
Le paramètre a été modifié (ici virage à gauche en reculant). A noter : certains paramètres ne sont pas accessibles contrairement à l'interface sur tablette ou PC, par exemple les connexions des moteurs/capteurs (ici B+C) ce qui impose l'architecture du robot.
On exécute le programme en sélectionnant le bloc départ et en appuyant sur le bouton de validation.

